

|
|
 Third Generation underwater dredging robot-JD A4
Third Generation underwater dredging robot-JD A4
Using our 17 years of experience in the underwater engineering industry, the self-developed "intelligent dredging robot" , "underwater online dredging system" and "underwater robot operating system" have many successful cases in municipal dredging, hidden culvert dredging, river dredging, pumping station deep water dredging and sand cleaning services, the utility model has the advantages of continuous water operation, avoiding the environmental pollution caused by the overflow of sewage, hazardous gas in the closed space to the construction personnel, high cleaning efficiency, on-line monitoring and control of the robot operating system, etc. , in the municipal hidden culvert clearing, sewage pumping station non-stop water clearing, sewage plant pond non-stop water clearing, drainage main pipe water clearing silt barrier has a considerable municipal competitiveness. The underwater dredging robot can customize the solution according to the different requirements of each customer.
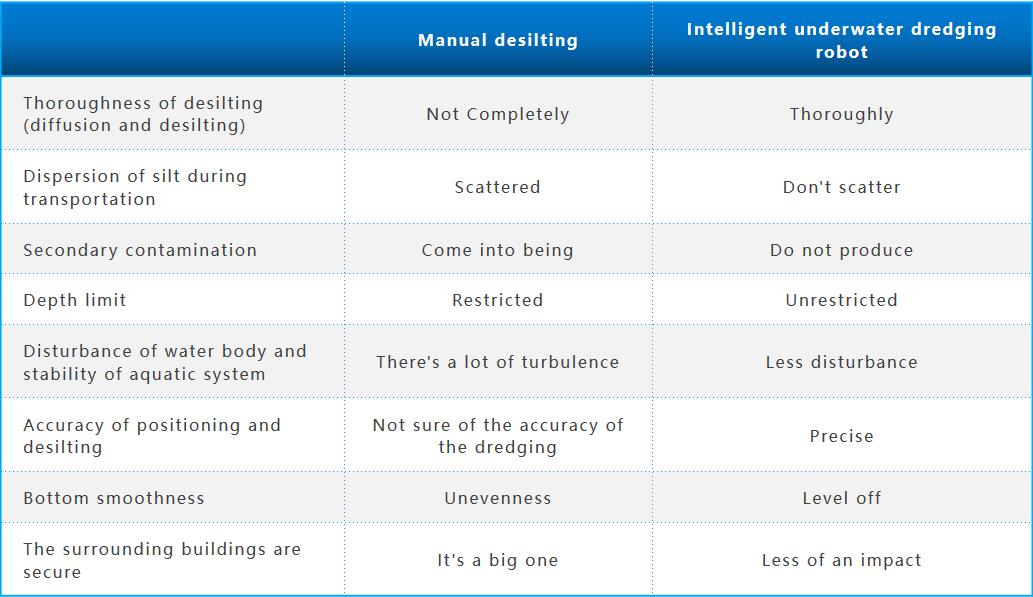
Comparison of dredging robot and traditional dredging
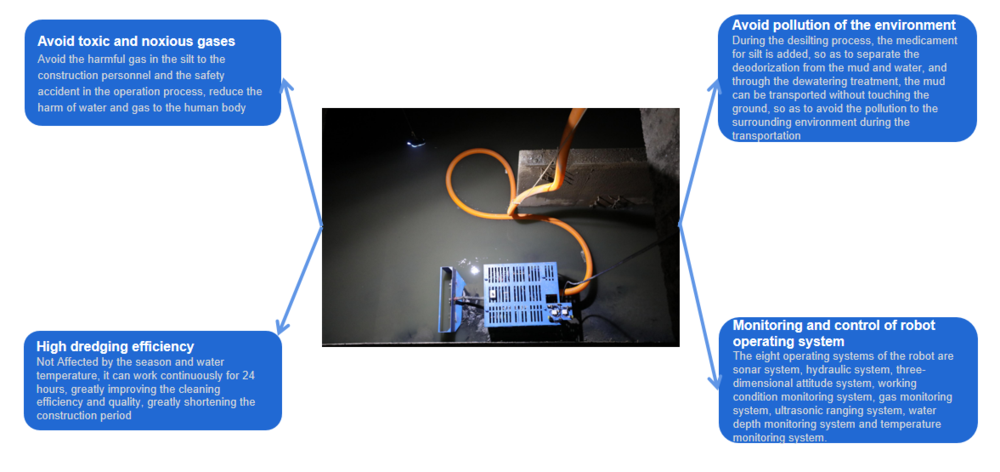
Advantages of silt-cleaning robot
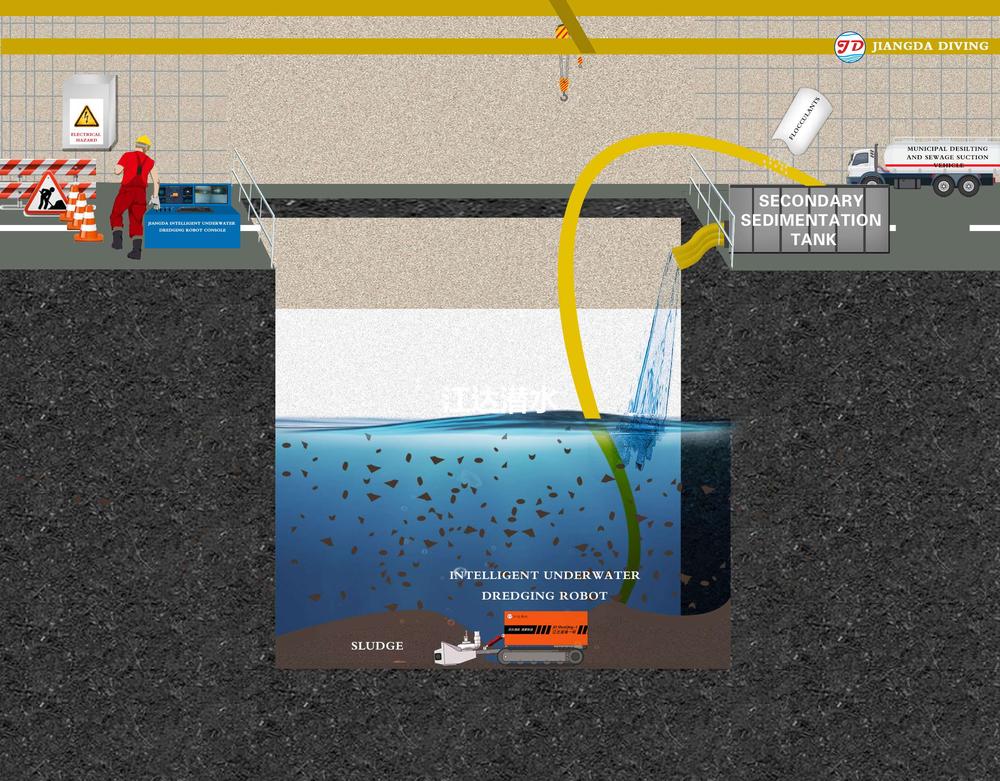
Desilting diagram of desilting robot
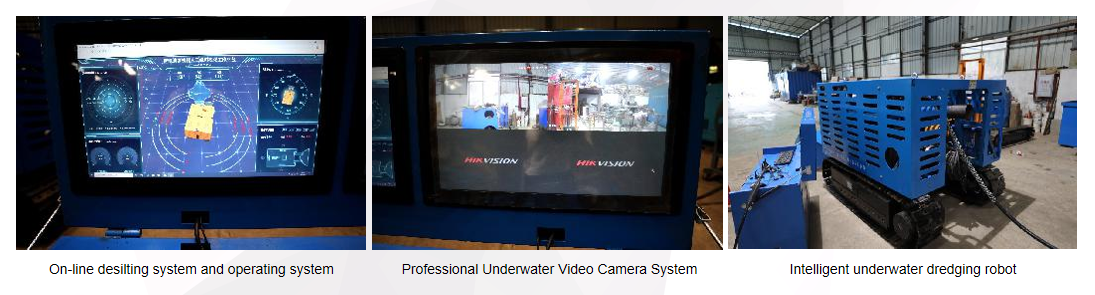
1.The construction first opens the pump house cover board, hoists up a working pump, gives the robot to launch vacates the work space, then uses the Gantry Crane to cause the robot to enter the Water Collection Pool. 2.The robot uses the rangefinder and sonar to feed back to the ground station system in real time to monitor the position of the robot and its surrounding environment, and then adjusts the position according to the position of the robot, simultaneously stirring and pumping the silt to the ground sedimentation tank, after the sedimentation tank filtration, so that the sludge water content of about 80% , and then transported to the designated location by suction sewage truck. Robotic dredging system The dredging system consists of a robot water platform and an underwater dredging robot walking mechanism. The water platform consists of two 21-inch high-definition screens, a robot operation panel and a high-performance main engine. The volume of the underwater dredging robot is adjusted according to the customer's requirements and the engineering site.
Robot Front Shovel The front shovel consists of a trash rack, a water gun barrel and a nozzle. The machine body consists of slurry pump, high pressure water gun pump, hydraulic power station, robot control system and related sensors. The desilting discharge can reach 150 m/h and the mud content can reach 10% ~ 20% . The underwater dredging robot has the corresponding functions such as underwater video recording and gas detection. 1. Front Shovel Main Body: the Front Shovel main body is about 1.6 m long and 0.6 m high irregular container, which can gather the sediment in front of the suction hole and improve the suction efficiency. The main body provides a solder joint for securing the associated desilting structure. 2. adjustable water gun: adjustable water gun mainly for different silt height adjustment, to ensure the silt erosion efficiency. The highpressure water comes from the high-pressure water pump. Combined with the high-pressure nozzle, the sludge can be flushed out directly by the slurry pump. 3. anti-clogging pump trash rack: anti-clogging pump trash rack to prevent some volume over the maximum diameter of the slurry pump inlet into the body of the pump caused by clogging or even damage. The bottom of the trash rack of the anti-blocking pump is designed to have a sharp angle shape, and some lumpy sediments are scooped up and then dispersed by a water gun to suck them out. 4.Suction outlet: The suction outlet is mainly connected to the slurry pump through a hose, and the slurry mixture is pumped to the ground.
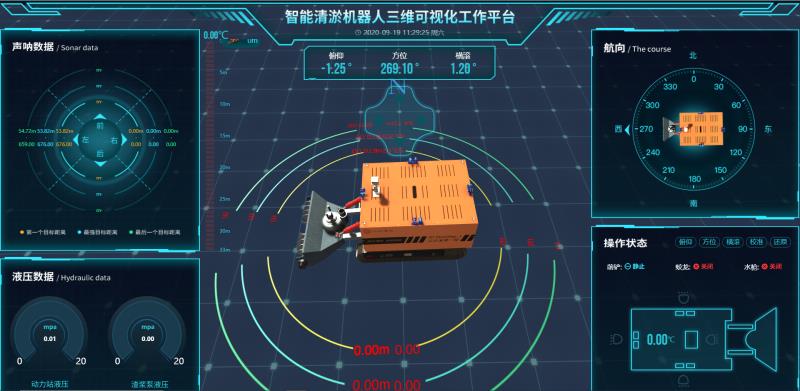
Physical drawing of underwater dredging robot's front shovel Robot Body Main Body: the main body is composed of the main structure frame and chassis of the robot. The chassis adopts hydraulic motor type chassis, the maximum climbing capacity can reach 40 ° , the walking speed is 4-6 m/min. The structure frame mainly provides the support for the robot's corresponding equipment. SLURRY PUMP: The slurry pump is an 18.5 kw sewage pump, with a maximum flow rate of 180m/h, a maximum flow rate of 100mm, a lift of 20m, and a reamer device. HIGH-PRESSURE WATER PUMP: high-pressure water pump power is 11KW, flow rate is 40m/h, head is 40m. The high-pressure water pump pumps the water around the machine and pressurizes it into the water gun barrel in front, and adds the corresponding structure to form the high-pressure water gun. Junction box: The junction box divides the main cable into corresponding wires to the corresponding equipment. Hydraulic Power Station: Hydraulic Power Station loaded with 120 liters of hydraulic oil and hydraulic motors, electricity into hydraulic power, for the robot crawler and the front shovel cylinder to provide power. Robot control box: Robot Control Box Integrated Hydraulic Control and electrical control, control the robot forward and backward and the corresponding action. The robot uploads the sensor data to the robot control box and outputs it to the host computer. High-definition Underwater Camera: For the harsh underwater environment, camera module using professional underwater camera module, clarity up to 1080P. Underwater LED lighting: Underwater LED lighting mainly for underwater video to provide light source, LED module waterproof module, reduce the failure rate. OBSTACLE AVOIDANCE SONAR: Obstacle Avoidance Sonar main detection equipment and obstacle distance, so that the robot can be in the dark environment normal construction, safe construction. Robot operating system interface
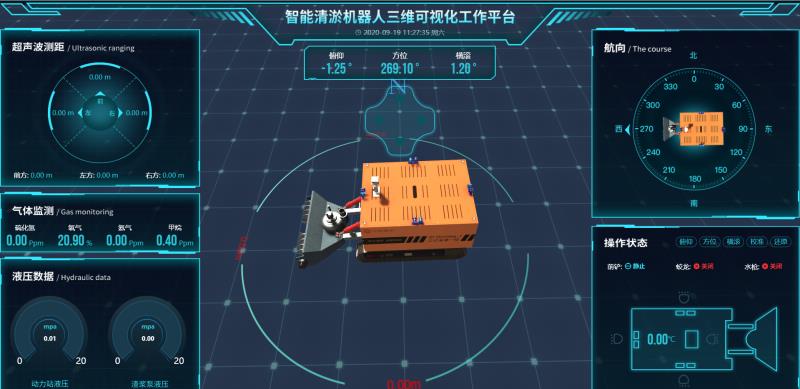
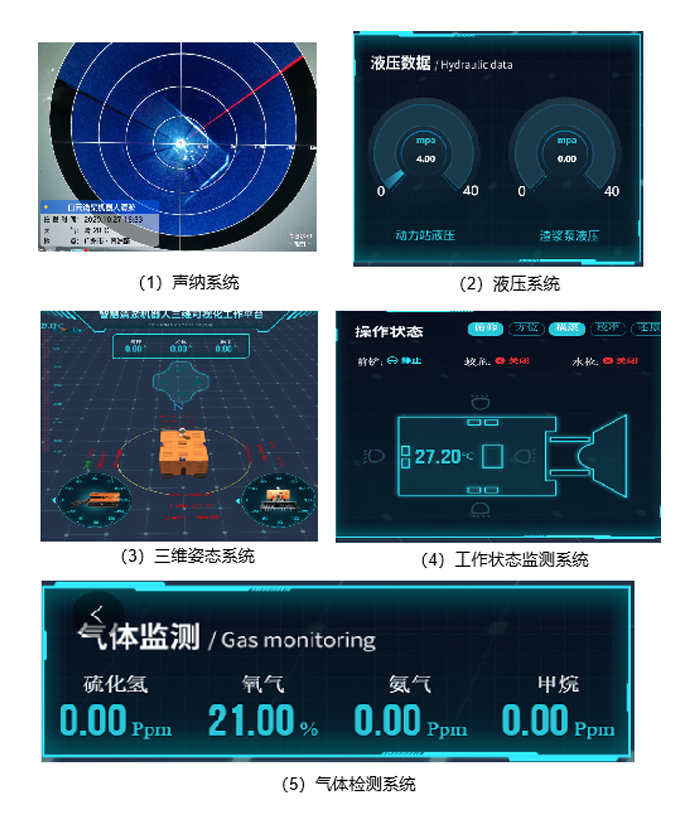
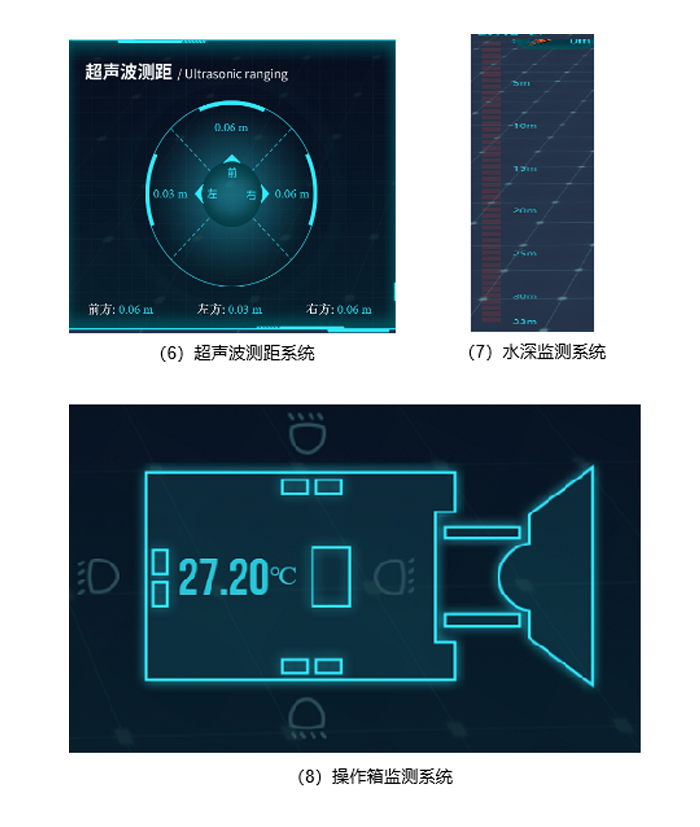
(1) the sonar system is composed of four obstacle avoidance sonar and robot operating system. Four Obstacle Avoidance Sonar are installed in the front, back, left and right positions of the warping robot. The real-time detection of the distance between the robot and the obstacle is transmitted back to the robot operating system, which processes the data uniformly, achieve the interface display and distance alarm consequences. The overall delay of the sonar system is less than 1s. (2) the hydraulic system the hydraulic system feeds back the data into the operating system by monitoring the hydraulic circuit of the silt-cleaning robot, so as to detect whether the robot is at rest or in motion and whether its movement is hindered. (3) the 3-d attitude system dredging robot is equipped with 3-d attitude sensor combined with 3-d visual display of the operating system to monitor the 3-d attitude of the robot in real time, and whether the robot produces pitch or roll attitude or not, and real-time display the degree of pitch or roll to prevent the robot from rolling over.(4) working condition monitoring system working condition monitoring system is to judge whether the robot performs the corresponding action of the operator through the rocker action and the corresponding hydraulic data, and display the status of the existing robot. (5) gas detection system the gas detection system is designed to detect the concentration of gases in the construction environment when the pipe is not full of water. It is currently designed to detect the concentrations of ammonia, hydrogen sulfide, methane and oxygen, real-time monitoring of construction environment in accordance with the construction standards. (6) ultrasonic distance measurement system ultrasonic distance measurement system is used to measure the distance of obstacles under the condition of unfilled pipe water. High precision and high speed are the characteristics of ultrasonic distance measurement. (7) The desilting robot of the water depth monitoring system is equipped with the water depth sensor, which is used to monitor the depth of the robot, determine the position of the robot, and send the data back to the interface through the cable. (8) operation box temperature monitoring system due to the use of motor and related electronic equipment will generate heat when the robot work, in order to prevent the temperature of the box beyond the normal working temperature, so equipped with robot temperature detection system.
The warping robot has the authority authentication, the quality has the safeguard
Learn more about JIANGDA diving TIKTOK in this underwater engineering video and an intelligent silt removal robot video.
Contact: Miss Lu:+86 18988834249 Mr Miao:+86 13318838881 |



Address:rooms 13, 14 and 15, 24th floor, No.68 gangwan road, huangpu district, guangzhou
Contact: Mr. Miao +8613318838881 Ms.Lu+8618022346003
Phone:020-32372563
E-mail:gzjiangda@126.com
QQ:496040640
