

;)
新一代机器人预告——水电站检修作业机器人发表时间:2020-04-27 11:25
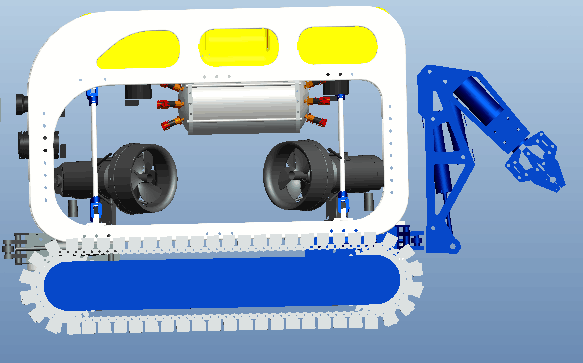
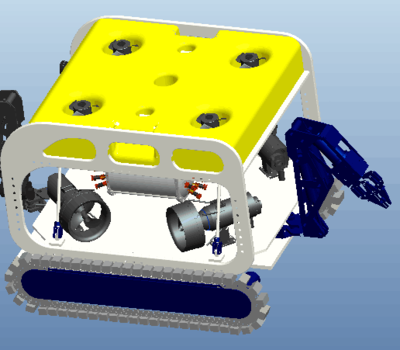
简介 水电站检修作业机器人系统主要由姿态可调整水下机器人本体、水下机械手和表面清理工具、视觉与激光检测系统组成。机器人前部带有机械手和其他作业工具,机器人后部通过脐带缆与水面岸上系统连接。 基本参数 重量:200KG 耐压深度:200米 机械手自由度:5自由度 机械手负载:20KG 观测传感器:摄像机、声呐 定位方式:超短基线 工作方式 水下人具有AUV和ROV两种作业模式。首先是AUV模式,机械手收回减小阻力,在水下进行大范围巡航,当运行到工作地点,机器人悬浮,这时切换到ROV模式,操作人员可以像操作ROV一样来操作此机器人。 |
地址:广州市黄埔区港湾路68号中交港湾国际大厦24楼13~15房
联系人:苗总经理:13318838881 李先生:13310883081 苗经理:15989066521
电话:020-82558210
QQ:496040640
